
(still somewhat under construction but getting there)
This page describes connecting a FTDI/Vinculum VDRIVE2
module to the 8052-based
HP/IDE disk
controller design I have connected
to my HP2113E minicomputer for saving and
restoring a SimH
HP2100-compatible disk image to and from a USB thumbdrive.
Previously I was using a USB drive tray for this purpose but that has
prevented being able to put the thing in a real box, isn't good on the
cables and drive, and required using disk imaging software with
byte-swap capability. The USB solution is slow (about 6KB per second)
but can be operated in the controller's "debug mode" without having to
run the minicomputer, so its slowness is usually not an issue. The HP-IPL/OS
system I use has both IDE and 7906 disk drivers, permitting direct copy
of the system to and from a 7906 disk image which can be used under
simulation. This is essentially the same system in the 7906 disk
simulation package, which can be
copied as-is to the IDE drive using the restore feature. The mod is
also useful for backing up the disk of a pure-IDE SFS-based HP-IPL/OS
system even if not simulating. In addition to a backup/restore
solution, the new controller code also permits directly accessing the
VDRIVE2 and USB files from the minicomputer.
The toggle switch is for
selecting the operating mode, to the left is "debug mode" where I can
save and restore IDE disk images to and from a USB drive using a serial
terminal to make selections, in the middle it just boots to Paulmon, to
the right automatically starts the interface code for normal operation,
optionally sending a "BOOT" file from the USB drive to the HP first. I
still probably should add a push-button switch for resetting the
controller
next to the toggle switch, after booting the HP, the reset button on
the PCB has to be pressed to
resume being a disk interface.

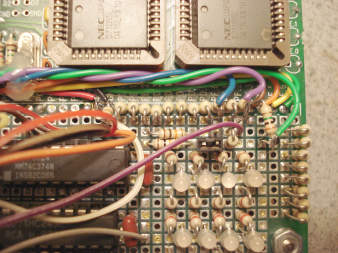
The VDRIVE2 and toggle switch was mounted on the level-shifter board
using hot-glue, added an extra 10K pullup resistor for the PF2 line
used to engage auto-mode by switching low. Also added 470 ohm resistors
to the PF0 (debug) and PF2 lines in case they get selected outputs,
optional but probably not a bad idea. The added 1M
resistor on the right side of the board weakly pulls PF3 low should the
VDRIVE2 becomes disconnected,
causing 0 to be read rather than random data, optional (leftover from
debugging).
Since the photos were taken I added additional power supply
decoupling to both +5V/GND proto area connections, including to where
the VDRIVE2 is powered from.
Connecting the VDRIVE2
The VDRIVE2 module is connected to the IDE interface circuit as
follows...
Pin 1 (ground) to Ground
Pin 2 (data out) to Port F bit 3
Pin 3 (power) to +5V
Pin 4 (data in) to Port F bit 4
Pin 5 (clock) to Port F bit 5
Pin 6 (select) to Port F bit 6
Port F is Port C of the 2nd 8255 chip. To make use of the optional
"Auto" program then a 10K pullup should be connected from +5V to Port F
bit 2, with a switch pulling the line low to automatically start the
interface code without having to make the interface code itself
autostarting.
If using the level-shifters depicted in the IDE interface schematic
then a 150 ohm 1/2W resistor load needs to be connected between 5V and
GND to bleed off leakage from the HP. My proto already had a 330 ohm
1/4W for ensuring the 8052 resets but that didn't drag the voltage low
enough for the VDRIVE2, added another 270 ohm 1/4W (total about 150
ohms) to reduce the supply leakage to about 1.2V for reliable reset.
Originally I measured this at 0.6V but it depends on the data state,
100 ohm 1/2W might be a better load.
Additional power supply decoupling should be added at the point
where the VDRIVE2 is powered from. I used a 47uF capacitor in parallel
with a 0.1uF capacitor for the higher frequencies. The VDRIVE2
maintains important data structures in memory, so a glitch or excessive
noise on the power supply lines might cause unpredictable (and
unrepeatable) behavior.
The firmware in the VDRIVE2 module had to be upgraded to
work properly! Upgrading is easy, just download the latest
VDAP ".ftl" firmware from the Vinculum website (I'm using version
3.66), put it on the thumbdrive and rename to "FTRFB.FTL", and insert
into the powered VDRIVE2 module. Use the FWV command at the debug
mode's "dos prompt" to
verify the upgrade. Also note that the firmware manual versions do not
correspond to firmware code versions, manual version 2.05 is for
firmware version 3.66, and the 2.08 firmware that came in my unit was
in fact quite old.
The thumbdrive or USB hard drive must contain a
FAT-based
file system with 512 byte sectors in the first partition. FAT32 is
supported but long filenames are ignored and can cause file naming
issues - if a file is renamed a PC continues to see the original name
despite the name change. Avoid using the VDRIVE2 to rename files copied
from a PC. After writing files to a stock (multiple FAT) format, the
Windows XP disk check function reports no errors but the Linux
fsck.msdos utility complains about the FATs not matching. To avoid this
the device can be formatted with a single FAT using the mkfs.msdos
utility with the -f 1 option.
Controller Code
The assembly sources are for the AS31 assembler, configured
for the Paul
Rev5 dev board. The main source is configured to not autostart and
includes an init program at the end to select 9600 baud (@22mhz),
remove this part if using a Paulmon with a hard-coded baud rate. I use
the "Auto PTR" program to selectively boot the HP and afterwards run
the disk interface rather than making the interface code autostarting,
thus preserving access to Paulmon for debugging and running other
programs.
This version of the HP/IDE disk controller code adds disk image
save and restore options to the existing serial-access debug menu, and
adds an additional menu for sending and receiving bytes to and from the
VDRIVE2 module and interacting with the USB file system from a "dos"
prompt. Care must be taken when using these functions, the send/receive
options are intended for testing and exactly determining the protocols
of various commands, it's quite easy to lock up the VDRIVE2 module if
incorrect sequences are given (but that's the point, to find out what
works and what doesn't). The prompt can be used maintenance and general
browsing of the USB file system, but is not intended for manually
opening and writing files. In particular, each single-line command must
return output or it will hang, reset to recover. Some error states
require cycling the power to recover, and if experimenting keep a disk
checker/fixer handy. The "light" version does not include the extra
debug functions except for the prompt for file maintenance.
The image save option prompts to save a 7906-sized platter (about
9.6 megabytes) or to save from one to nine 64-file SFS volumes (about
4.1 megabytes for the first volume and 4 megabytes for each additional
volume). The image restore option restores
however many complete 1KW blocks are present in the disk image file.
The bytes in each 16-bit word are swapped on save and restore for SimH
compatibility. These operations require about 3 minutes for each
megabyte of data saved or restored, save operations must complete to
avoid "lost cluster" file system errors.
The controller code provides additional HP/IDE interface commands to
send and receive SPI bytes, call the sync and response clear
functions, and functions for unstructured reading and writing buffered
"stream" files. The VDOS words permit running a USB dos prompt from
HP-IPL/OS, streaming read and write files, and sending raw Vinculum
commands for writing file-processing programs - however expect lockups
and USB file system errors when debugging raw dos code! The
streaming functions are much easier to use, these permit assigning read
and/or write files to HP-IPL/OS' existing "MS" (mass storage) system
which works much like papertape. Files are only actually open when
filling or empying a buffer, creating the illusion of both
read and write files being "open" at once and protecting the file
system should the write close command not be given. Write files
must be closed to write the remaining buffer data and avoid an
incomplete file, if forgotten and the thumbdrive is removed it can be
reinserted and the close command given, provided no other stream
operations have been performed.
Adventures in SPI-land
The first task for using the VDRIVE2 module is establishing a SPI
connection, this requires the microcontroller to be able to flip bits
on three output lines and read one input line without glitches. Some
processors have a built-in SPI port, I don't know much about these but
to be useful it must be able to read the SPI port without blocking and
return a status bit which the VDRIVE2 sets to 1 if it is busy or there
is no more data. For other processors the SPI protocol must be
"bit-banged" by individually flipping output bits and reading the input
bit. Beware of bitset/bitclear instructions which sometimes cause brief
upsets on the other pins, rather a variable should be used where one
bit is set or cleared at a time and copied to the output port register.
For this project the only available bits were on port C of the 2nd 8255
I/O chip (labeled port F on the Paul dev board), good thing since only
port C/F can be split into both input and output pins. Don't expect
great speed bit-banging SPI on a 8255, I'm getting roughly 8KB a second.
Here's the algorithm I'm using to send and receive SPI bytes (more
or less)... [10/18/08]
variables: data_register, count
output bits: clock, select, data_out
input bit: data_in
flag: status
InitSPI:
set up port control bits and variables to access the SPI device
clear clock, select and data_out bits
return
ReadSPIbyte:
clear select and data_out bits (clock bit should be clear on entry)
set clock bit
clear clock bit
set clock bit
clear clock bit
set select and data_out bits
set clock bit ;send 1
clear clock bit
set clock bit ;send another 1 for read
clear clock bit
clear data_out bit
set clock bit ;send 0
clear clock bit
data_register = 0
count = 8
rloop: shift data_register left
data_register bit 0 = data in bit
set clock bit
clear clock bit
decrement count
if count <> 0 then goto rloop
status = data_in bit
set clock bit
clear clock bit
clear select and data_out bits
set clock bit
clear clock bit
return
WriteSPIbyte:
clear select and data_out bits (clock bit should be clear on entry)
set clock bit
clear clock bit
set clock bit
clear clock bit
set select and data_out bits
set clock bit ;send 1
clear clock bit
clear data_out bit
set clock bit ;send 0 for write
clear clock bit
set clock bit ;send another 0
clear clock bit
count = 8
wloop: rotate data_register left into carry flag
data_out bit = carry flag
set clock bit
clear clock bit
decrement count
if count <> 0 then goto wloop
status = data_in bit
set clock bit
clear clock bit
clear select and data_out bits
set clock bit
clear clock bit
return
ReadSPIwait:
call ReadSPIbyte
if status flag set then goto ReadSPIwait
return
WriteSPIwait:
call WriteSPIbyte
if status flag set then goto WriteSPIwait
return
Note: don't consider this algorithm "correct", it's just what (I
think) my code does. In my code InitSPI also sets the DPTR address
pointer to the port address and clears an output "shadow" register in
which to flip bits to copy to the port as one step. InitSPI must be
called before using the SPI read/write functions after printing, buffer
operations or anything else that might disturb DPTR. The data_register
is kept in R4 and status is returned as a non-zero value in the
accumulator.
Programming the VDRIVE2 isn't exactly easy, in SPI mode it's hard to
determine if a invalid response means end-of-data or if it just means
it's thinking about what to send next. To counter this it's necessary
to syncronize the unit so further responses correspond with the last
command
that was sent, to do this I'm currently using the following
algorithm... [updated 10/10/08]
sync: call the clear code
send E[cr] to SPI (wait to be accepted)
read byte from SPI (wait for response)
if byte isn't 'E' goto sync
read byte from SPI (wait for response)
if byte isn't 13 goto sync
send e[cr] to SPI (wait to be accepted)
read byte from SPI (wait for response)
if byte isn't 'e' goto sync
read byte from SPI (wait for response)
if byte isn't 13 goto sync
call the clear code
return
The clear algorithm is:
clear: initialize SPI interface
clear1: read byte from SPI (don't wait)
if valid goto clear1
count = 100
cloop: delay a bit
read byte from SPI (don't wait)
if valid goto clear1
decrement count
if count not 0 then goto cloop
return
"Delay a bit" in my code is 200 djnz instructions in a loop. The
sync code is called to establish communications with the VDRIVE2 and
ensure upon return no output is pending. The initialize SPI interface
subroutine sets up
the port and dptr to permit using the read byte and write byte
subroutines, which have extra wrapper subs which read until valid, and
write until accepted. The clear subroutine is called by sync to remove
responses from the output stream, and also called when
the rest of an immediate response needs to be discarded, in particular
after error
responses or after sending commands and I don't care what it says in
response (switching to short commands, binary values, etc). The clear
code waits for a bit to see if a response is coming but does not wait
if a delayed response is coming, so won't clear responses after file
opens or other commands which require processing time.
Presenting a "dos prompt" in which Vinculum commands can be typed
and responses displayed is very handy for listing and changing
directories, deleting and renaming files, listing the contents of files
and other tasks. The prompt code must send "ECS" and "IPA" commands
when starting to ensure plain text commands and responses. Don't
attempt to use a prompt to directly write files, the exactness of the
protocol almost guarantees locking it up and losing a cluster in the
process and the VDRIVE2 does not issue a response until all bytes
specified in the write command have been received. The 8052 prompt code
depends on a response being sent after every command and there's no
provision for editing a command line. The prompt implemented in the
VDOS package for HP-IPL/OS is a little kinder, the 8052 interface code
implementing the SPI byte read waits a little bit but if no response
after a timeout period returns with an invalid bit set and it simply
prints nothing, and backspace works for correcting mistakes before
sending the command. But still don't attempt to directly write files
from a prompt. One little problem when displaying responses - the
Vinculum firmware terminates each line of output with a single CR but
most terminals require CRLF to move to the next line, so for proper
display the response print code must add LF when it prints a CR. If
done blindly then normal CRLF files will be double-spaced when read
using the RD command, the 8052 prompt code monitors the previously sent
character and only adds LF if one isn't printed. The HP-IPL/OS code
does things a bit more crudely and simply doesn't add LF's if a RD
command is issued.
The strategy for the 8052 image save code is to prompt for image
size, convert
the selected (hard-coded) number of blocks corresponding with the
amount of data to save into two bytes of an LBA
address to use to detect the end of the save, sets LBA to 0, deletes
"DRIVE0.DSK" if it exists, opens
"DRIVE0.DSK" for write, seeks to 0 [redundant], then for each 1KW block
reads it from disk, swaps the
bytes in each 16-bit word, and writes the buffer to the USB image file.
The strategy for the 8052 image restore code is to use the RD
command to read
the entire image file, capturing the bytes to a buffer. When the buffer
fills with 2048 bytes it byte-swaps the buffer then writes the 1KW
block to disk (automatically incrementing the LBA address which starts
at 0) and loops to get more bytes. End of image-file is detected when a
number of invalid reads of CR is detected (all VDRIVE2 responses end
with CR). All HP-IPL/OS IDE disk writes occur in 1KW chunks thus
IDE-compatible disk images are always multiples of 2048 bytes, so the
prompt output represents an incomplete buffer and is not written to
disk.
For core USB functionality from within HP-IPL/OS the interface
implements four commands:
Reading and writing buffered stream files from HP-IPL/OS is perhaps
the coolest of the new abilities (backup and restore is important but
more drudgery than cool), the stream functions eliminate having to know
how many bytes to read and/or write and both read and write files can
be "open" at the same time. In fact neither file is actually open
except when filling or emptying the read or write buffer so the user is
free to issue Vinculum commands that internally open files even while
streams are active. This prevents lost clusters on the USB drive should
the drive be removed before issuing the write buffer close command,
just an incomplete file (if remembered in time the drive can be
reinserted to save the rest of the write buffer).
For stream functionality the interface implements six commands:
These functions are very generic to permit translating this functionality to other HP interface designs, for that matter it doesn't have to have anything to do with a minicomputer, could be just an embedded application that doesn't want to issue complex Vinculum commands to read and write files. By default when a file is "opened" for write it appends to an existing file, to overwrite simply delete the existing file first. Seek operations are not presently supported by these high level commands for a few reasons: papertape provides no such ability so the HP-IPL/OS streams don't need or use seek commands; when Vinculum commands are used to open a file for write the size must be increased or a lost cluster results (at least with version 3.66 of the VDAP firmware); if seek/read/write/close is really needed facilities are already in place to do it directly using Vinculum commands; and finally adding seek operations would complicate the stream algorithms for something I don't need.
Perhaps one of the hardest parts about using Vinculum commands is
properly parsing the variety of error responses that might be issued,
in this respect my 8052 code probably isn't great. For many errors
(particularly those occuring while streaming) the code marks the error
as unknown instead of figuring out precisely what the problem is, only
the buffer open commands fully parse the error response to distinguish
between invalid filename, file doesn't exist, attempting to open a
directory, no disk, etc. It was a lot of code to write just so I could
play with USB files on my mini - I wanted to get to the latter part and
don't really care what the error was, only that an error occured.
Another factor is try to parse every response byte (even if
ignoring) without invoking another time-wasting sync or clear
operation, it's bad enough having to sync before doing buffer fills and
flushes in case something else issued a command and didn't empty the
response buffer. To avoid problems with uninitialized memory, each of
the read and write filenames has an additional 3-byte check field which
must contain certain characters or the name is considered invalid.
The
following text descriptions describe the buffered streaming functions...
To open a buffered read file:
Get the filename up to CR and put it in a read filename string
(truncate past 12 characters but make sure there's a CR after the string).
If an empty string was sent (just CR) then exit (abandons the read buffer).
Call the sync code and select short/binary commands.
Use the DIR command on the filename to validate the filename, this is a bit tricky
but if a CR response is received before space then it's an error, size follows space.
If error returned by DIR then invalidate the read filename, set usb_error and exit.
Store numbers returned by DIR after space in read file size (4 bytes).
If read file size = all 0 then it's a directory,
invalidate the read filename, set the usb_error value and exit.
Set the read file position to 0 (4 bytes).
Call the buffer fill code, if an error occurs then exit.
Mark the read filename as valid.
Exit.
The buffer fill subroutine:
Call the sync code and select short/binary commands.
Open the read file, if an error occurs invalidate filename, set usb_error and return.
Seek to read file position, if error close the file, invalidate, set usb_error and return.
Read exactly enough bytes to fill the buffer, parse response to account for EOF response
(don't set usb_error if "command failed" indicating EOF but detect other errors).
Set buffer pointer to the beginning of the read buffer.
Close the read file, if error occurs invalidate read filename, set usb_error and return.
Return.
To get a byte from a buffered read file:
If the read filename is empty or not valid then
send 0 to the HP, set usb_error and exit.
If read file position = read file size (4 byte compare) then
send 0 to the HP, invalidate read file, set usb_error and exit.
Get byte from the read buffer at location read buffer pointer and send to the HP.
Increment read file pointer, increment read buffer pointer.
If read buffer pointer is past the end of the read buffer then call the buffer fill code.
Exit.
To open a buffered write file:
Get the filename up to CR and put it in a write filename string
(truncate past 12 characters but make sure there's a CR after the string).
If an empty string was sent (just CR) then exit (abandons the write buffer).
Call the sync code and select short/binary commands.
Use the DIR command to validate the write filename (see open read comments).
If "command failed" returned that's OK (just means the file doesn't exist).
If another error occurs or if an all-0 size returned (directory) then
invalidate write filename, set usb_error and exit.
Set write buffer pointer to the beginning of the write buffer.
Set write buffer count to 0 (needed to know how many final bytes to write).
Mark the write filename as valid.
Exit.
To write a byte to a buffered write file:
If the write filename is empty or not valid then set usb_error and exit.
Store byte in write buffer at position write buffer pointer.
Increment write buffer pointer, increment write buffer count.
If write buffer pointer is past the end of the write buffer call the buffer flush code.
Exit.
The buffer flush subroutine:
If write buffer count = 0 then just return, nothing to do.
Call the sync code and select short/binary commands.
Open the write file, if error invalidate write file, set usb_error and return.
Write buffer count bytes from buffer, if error then
close write file, invalidate write filename, set usb_error and return.
Set write buffer pointer to beginning of write buffer, set write buffer count to 0.
Close the write file, if error then invalidate write filename, set usb_error.
Return.
To close a buffered write file:
Set usb_error to 0.
If write filename is empty or not valid then exit.
Call the buffer flush code.
Invalidate the write filename.
Exit.
The command to request the usb_error value just sends it back to the HP.
Whew! even expressed in high-level text it's a lot of code, and I mostly left out the parts for parsing the error responses except as they matter to the algorithm. The important thing to keep in mind if implementing a system like this, is no matter what the user does (including trying to read or write without opening and the memory is in a random state) the code must respond in a way that doesn't create disk errors, lock up the interface code or other undesired behavior. If an endless stream of zeros is returned causing HP-IPL/OS to lock up or cause a stack overflow that's OK, HP-IPL/OS already does that if an invalid stream is loaded and there are handy buttons on the front of HP minicomputer for halting and restarting if it loops forever thinking it's skipping an infinite leader, the computer is doing exactly what it was programmed to do. Sure timeouts could be added but it's easier to press halt, set P to 2 and press run then be more careful with what I type into the machine, but no harm done.
Project Notes
These notes are posted most-recent first, and subject to heavy
editing. The notes represent what I think, not necessarily what
actually is but I'm trying to hit it as close as I can. Theories will
be modified as needed.
6/14/11 - sure enough, UFSIZE did cause issues when there are a lot
of files, fixed as described below. Updated vdosext.ipl.txt and
hpiu.zip. It's a little "risky" waiting forever (not really, at worse
press halt, set P to 2, press run) but sometimes the VDRIVE just takes
awhile to respond.
11/17/10 - I had a few bugs... my PIC code wasn't waiting long
enough for VDRIVE responses, which fixed some of the issues I was
having when there were many files in a directory. But VWRITE and VSAVE
still failed, the problem was the VOWCHECK word was waiting for the
first byte but assumed the rest of the response would follow without
delay. Sometimes it doesn't, changed the code to use &WFVDR instead
of <VDR, that fixed it. There is similar code in the UFSIZE
word used to get the size of a file, mainly used when copying it to an
IDE/SFS disk (limited to 64Kbytes), but it does wait on the next byte
after the first return issued by the DIR command (the firmware returns
100000 octal when busy) so leaving it be unless it causes trouble (if
it does change the <VDR words in UFSIZE to &WFVDR to force it to
wait for every byte). VDRIVE programming can be tricky! what works for
one case might not always work.
Posted new vdos.ipl and vdosext.ipl files with the driver fix
(below) and the VOWCHECK fix, updated hpiu.zip with the new files -
seems to work fine with the 8052 interface. Not extensively tested
(booted, saved a system, reloaded, poked around a bit) but as the main
change was the input driver, would stand to reason that if there was an
incompatibility it wouldn't work at all... not that there aren't other
undiscovered issues but given the nature of the bugs that were fixed,
it's gotta be better. One thing I did notice... loading is faster using
the old 8052 firmware and hardware than with the new (v0.32) PIC
stuff... still got some optimizations to do, probably slowed things
down more than I needed to (but better slow than buggy until I know
exactly what I can get away with). The main advantages of the new
PIC-based USB adapter is it has native papertape emulation and files
can be attached using switches and an LCD without needing an HP-side
dos, but for raw transfer speed the 8052-based design is quite nice...
and has an IDE disk drive for running XDOS and SFS.
The new VDOS package behaves
slightly differently, instead of an autostarting !VDOS word that
patches itself to the IDE slot, the new package has a non-autostarting
VDOS word that pops the stack and patches to the specified slot. Upon
loading the package, the adapter slot is patched to the IDE slot if
configured, otherwise sets itself to the PTR slot. This permits
switching VDOS between the 8052 IDE adapter and the stand-alone adapter
by simply doing (in my case) 23 VDOS or 12 VDOS.
11/15/10 - [snip no longer relevant info] I'm working on a new PIC-based
USB adapter, it's basically operational except for tweaking. In the
process I discovered a bug in the VDOS driver - requested data from the
get vdrive byte,
get next file byte and get error code commands are returned in the
*same* command/flag cycle as the instruction, not a different cycle as
implied by the VDOS driver code (that's why STC,C didn't work). The
input driver should have been just a LIA port.
This...
* receive one word from interface
R1W NOP
* IF5 STC IDE,C
* THAT SHOULD WORK BUT DOESN'T ???
IF5 STC IDE
IF6 SFS IDE
JMP *-1
IF7 LIA IDE
IF8 CLC IDE
JMP R1W,I
(probably) should be changed to this...
* receive one word from interface
R1W NOP
IF7 LIA IDE
JMP R1W,I
Labels IF5 IF6 and IF8 are no longer used so they need to be removed
from the
patch table preceeding the code.
The extra STC causes the
command line to glitch, which the 8052 code appears to be too slow to
respond to
but the PIC code sometimes picks up - although under some conditions
(like when TBG is enabled) may also cause failure with the 8052 code
too. Here's an experimental patch for
existing builds until I can do more testing and clean up this
little mess.
This probably explains the unrepeatable mysterious "glitch" I had
during testing...
11/1/08 - I did further testing after reformatting my thumbdrive,
wrote test code that performed 1024 unique file copies to the same file
(512 each with both the "light" and "full" version of the interface
code), and another test that wrote 1024 small files with slightly
different content. No file errors at all. I did however discover that
if the file was more than a few hundred files deep in a directory that
the delay was enough to keep PVDR (print VDRIVE2 response) from
printing anything when using VSHOW - modified VSHOW and VDIR so they
wait for the VDRIVE2 to respond no matter how long it takes, and for
VPROMPT (the RD command had a similar display "bug") issued 5 PVDR
commands to give it 5 times as long to respond.
There was another glitch - just when I thought everything was
perfect did a disk command and it locked up. Thinking I might have a
power supply noise issue I added extra decoupling (47uF and .1uF
capacitors in parallel) at both +5V/GND points going to the proto area
of the Rev5 dev board - including at the point which the VDRIVE2 gets
its power. Then later while doing a dump I bumped a cable and heard the
drive reset - duh. Sometimes the most baffling bugs have simple
explanations! But given the nature of a device such as the VDRIVE2
which absolutely depends on a valid state, I'm adding a note about
decoupling to the connection notes.
10/28/08 - I think I'm going to take another approach to the VCOPY
incident - not exactly pretend it never happened, but close. I've never
had any trouble whatsoever with the image save and restore functions
(at least after upgrading the firmware to v3.66), I've probably cycled
it a dozen times accumulating about 100 megabytes of data writes. I've
never had any trouble with streaming real files. I do think I'll get
another thumbdrive and format it plain FAT with 8.3 filenames [which
turns out to be impossible with normal tools - no matter what it lets
the PC pollute it with LFN's] just in
case that's got anything to do with it, verify files (especially after
using VCOPY), back up my work, and if it happens again just rename the
errant file so those sectors won't be used again. It's just too darn
cool to let a little unexplained glitch scare me, I have to consider
the rest of the operations which all work perfectly... I sure don't
want to give those things up!
Doc file in the hpiu.zip has been updated, it mentions the glitch
(just in case it's an actual bug) but suggests a few simple steps to
mitigate possible effects should the bug strike. Who knows, a cosmic
ray might have picked that session to pass through and flip a bit...
hmmm... put the VDRIVE2 in a metal case? For that matter the entire
HP/IDE/USB controller should be encased (need to do that anyway).
10/26/08 - Posted the new vdosext.ipl "extra" package, contains
wrappers named VREAD VWRITE and VCLOSE that warm-boot HP-IPL/OS if
error (to keep further words on the same command line from executing),
prompt before overwriting an existing file, and print messages for
feedback. Also includes VLOAD for loading IPL files and loading and
running ABS files (like XLOAD but for USB files), VSAVE for saving the
current system to an ABS file on the USB file device, and UF2F and F2UF
for transferring files as-is between the USB device and SFS files on
the IDE disk. The UF2F word required a rather complex UFSIZE word that
uses the DIR command and parses the output to determine the size of a
file to know how many bytes to transfer and make sure the file isn't
too big for the Simple File System (just shy of 64KB max). The package
contains a new VCOPY word with more proper error-checking but ran into
a problem - after a long debuging session it glitched while copying a
small file, the size of the file was properly updated but the data
itself was not written to the file. The next day the same test copy to
the same file worked perfectly. Weird.
The zip file now includes a text file documenting this stuff, warts
and all. I might discover things that change its contents so if the
file date of the zip changes and the other dates didn't, I'm fiddling
with the docs.
10/25/08 - The VCOPY example shows the basics but is too simple -
there's no validation of filenames other than what the raw words do,
and no protection from specifying the same file for both input and
output which would destroy the file. Windows permits the same thing
(i.e. type file > file) so I'm not too inclined to worry about
"fixing" this in the HP/IDE/USB controller code, it's more than just a
simple string compare since different strings can map to the same
filename. The current interface code may need consolidated to eliminate
having "full" and "light" versions (when I figure out what's important
and what isn't), but as far as I can tell the current 8052 code works
fine so it'll take more than it wrecking a file when given garbage
input. Besides, the new "extra" VDOS words I'm working on include
confirms etc to keep that from happening, coming soon along with a
detailed doc file explaining what all this stuff does.
I'm not sure if anything should be done in the interface code to
prevent opening both read and write streams on the same file, fixing
that would take quite a bit of extra code (more than simply comparing,
different strings can map to the same internal filename). Tenatively my
inclination is to do nothing in the controller code to prevent (GIGO)
and do the extra error-checking in additional words to add to VDOS.
Windows does nothing to prevent entering a command like "type somefile
>> somefile" (which churns away until the disk is full and the
system goes down, oops maybe I shouldn't mention that :-) so if a major
OS in use by billions doesn't check to see if the input and output
streams point to the same file, I don't see why I should bother to do
that in a system used by maybe a couple people on a good day... just
don't do it.
10/20/08 - Here's a simple USB-aware IPL program for copying a
file...
;COPY ONE FILE TO ANOTHER FILE
;USAGE "FILE" "COPYFILE" VCOPY
DEFINE VCOPY
$SWAP USBREAD USBSTAT IFNZ $DROP ELSE
USBWRITE USBSTAT IFZ ;both files opened OK
DO #0 ;loop, change 0 on stack to <>0 to stop
MSBIN ;get byte from file
DUP IFZ USBSTAT IFNZ SWAP INC SWAP ENDIF ENDIF ;detect eof
OVER IFNZ DROP ELSE MSBOUT ENDIF ;if not eof write to output
UNTIL ;end of file
USBCLOSE ;close output file
ENDIF
ENDIF END
CONSOLE
With this I can copy any ABS binary to "BOOT" and directly boot it
using the IBL papertape bootrom and the "Auto PTR" hack. For my
dual-driver systems it was a bit tricky, need to have the IDE boot code
in memory even if not used so it won't prompt, and the precanned ABS
save code ignores memory over 31KW. So instead (after redirecting to an
ABS file using USBWRITE) I used PTZERO, AAOUT and ABSOUT to manually
build the boot system binary the way I wanted it. Mainly though I
wanted to see how long it takes for the stock papertape bootrom to boot
a large ABS from USB - about 8 seconds, or about 7KB per second. Almost
as fast as the raw SPI read speed (8KB per second).
10/19/08 - Put equates at the beginning of the interface source to
make it easier to configure memory and port usage, the stream buffers
are now set to 2.2KB each to be compatible with the original IDE
interface design. I can tell hardly no difference from the previous 4KB
buffers so I'll probably leave it that way. No significant code changes
except now the USB errors are numbered more reasonably. A more
significant development for my HP mini hobby pursuits is I can now boot
my HP without the help of a PC. To do this I copy/pasted some HP
hardware and USB subs into the previous "Auto PF2" program I was using
to autostart (now called "Auto PTR") and wrote code to send a "BOOT"
file to the HP if it's on the USB drive but rigged so subsequent resets
run the disk interface unless I cycle the interface power, or flip my
"auto" switch to Paulmon mode and reset which clears the mark it leaves
to tell itself it's already run. Now my startup procedure is power the
HP, power the interface with a thumbdrive in it containing the BOOT
file, put 2300 in S, store, preset, IBL, preset, run (S bits 0-5 light
up indicating successful load), then I press the reset switch on the
disk interface, put 77600 in P, store, preset, run, it boots from the
disk. Before I had to do the same things on the HP (except put 1200 in
S) but also had to close the console terminal, move the serial cable to
my PTR emulator, run HPSEND, close that, move the serial cable back to
the console and run the console terminal. No more.
Here are some benchmarks with HP-IPL/OS 1.52 w/ VDOS 10/18/08
running on my HP2113 E-series mini and my 22mhz Paul Rev 5 board
running the HP/IDE/USB interface code:
Save 2-volume 8.1 megabyte image file: 24 minutes 49 seconds (5689 bytes per second)
Load 2-volume 8.1 megabyte image file: 23 minutes 54 seconds (5907 bytes per second)
Save 46.7KB VDOS.ABS with 4KB buffers: 1 minute 2 seconds (772 bytes per second)
Load 43.1KB TREK.ABS with 4KB buffers: 39 seconds (1131 bytes per second)
Save 46.7KB VDOS.ABS with 2.2KB buffers: 1 minute 3 seconds (759 bytes per second)
Load 43.1KB TREK.ABS with 2.2KB buffers: 40 seconds (1103 bytes per second)
Save 46.7KB VDOS.ABS w/ 512 byte buffers: 1 minute 15 seconds (638 bytes per second)
Load 43.1KB TREK.ABS w/ 512 byte buffers: 51 seconds (865 bytes per second)
Perform 65536 bytes of raw SPI reads: 8 seconds (about 8192 bytes per second)
Some observations... only the raw SPI and image file times seem to
represent the actual performance of the bit-banged SPI code, i.e. would
be significantly affected by clock speed, better architecture etc. The
stream operations don't get anywhere close to the native speed and are
mostly limited by HP-IPL/OS itself (the SYSALL and ABSLOAD commands are
written in interpreted code), and in the case of the 512 byte buffer
tests, possibly by the speed of the VDAP firmware when opening and
closing files (the smaller the buffers the more often it has to do
that) plus the overhead of having to sync etc before every buffer fill
or flush. A better test would be to time how long it takes to
read/write streams using machine code, and how long it takes to boot
the Trek game via IBL and the Auto PTR app - I bet it's much closer to
the raw read speed.
10/18/08 - Everything seems to work including the new IDE status
request command, but curiously when receiving USB data back from the
interface I had to use a plain STC slot after sending the read request
command, the usual STC slot,C request doesn't work. No idea why, STC
slot,C works after giving the new status request command but doing the
same for the read SPI function causes garbled data to come back despite
using almost identical code procedures. I'm still not that good at HP
I/O procedures so I count myself lucky to make it work at all, if it
doesn't like C then so be it but probably need to find out what the
deal is in case it matters. As far as I can tell it doesn't, just have
to read the data back in a way that works.
To assist in possible porting efforts and to explore the effect of
smaller buffers I made an alternate "light" version of the interface
code, in the hpiu.zip file. This version doesn't have the extra USB/SPI
debug functions and confines ram usage to 3000-3FFF hex to avoid the
port at 4000 in the original IDE interface design. The smaller 512 byte
(vs 4 KB) buffers slow stream operations by about 20-30%, bigger
buffers are better. Even with the debugging stuff removed the code is
still far too big to load before the buffers in the current
configuration, must load into flash rom at 8000 and above. The larger
code version can also be configured for smaller buffers, edit the
constants at the beginning of the stream code.
I don't know what to do with the stream error return values, right
now they're powers of 2 except for the unknown error 255. Originally I
wanted to allow for OR-ing the bits so multiple errors could be
reported but presently nothing in the code does that. In general it's
probably never a good idea to count on specific numbers whether from
the stream functions or the IDE error value. Regarding the IDE error
value, no idea what the returns are supposed to be (can't make the disk
make an error) but I added code to set the value to 255 should an
unrecognized command be sent to the interface so the new IDE status
command will report something besides 0 when in an error-lock state.
10/14/08 - Streaming works! might need to tidy up a few things but
essentially the new code does the main things I want it to - save and
restore disk images off-line in debug mode, permit raw Vinculum
commands to be given from HP-IPL/OS and parse responses, and read and
write USB disk files using the normal HP-IPL/OS MS stream system. The
present VDOS code was edited on the mini, saved to a USB file then
copied it here. Only difference from the previous 10/12/08 version is
USBCLOSE now reports an error number if one occurs, with the original
"raw" USBCLOSE word renamed to &UCLOSE. Speed is good enough,
dominated mostly by the speed of HP-IPL/OS itself. Can load an ABS file
from USB in about a dozen seconds give or take depending on size,
previously this took minutes using my pass-through PTR emulator to load
the file from my PC, bigtime better.
I learned a couple things... if sending/receiving HP data in an
added IDE command then it needs to exit with a jump to hp_disk rather
than dx_done, otherwise it messes up the handshaking if another command
comes along too quickly. I was able to load an IPL (slow) but the
faster ABSLOAD failed, and doing USBSTAT too fast after another command
returned 0 instead of the actual value. After exiting via hp_disk all
was well. The other thing I learned is there's a huge difference
between clr A and clr acc - AS-31 assembles the latter to a bit
instruction and doesn't clear A at all. But still have to push acc to
push A.
10/12/08 - I made a slight change to my IDE controller hardware -
added a SPDT
center-off switch and a 10K pullup to port F bit 2 connected to one of
the switch terminals with the other connecting to the usual debug mode
input and pullup on port F bit 0. Also added 470 ohm resistors in
series with bits 0 and 2, mainly for convenient places to solder the
wires from the switch but also to limit current should the bits ever
get configured as outputs. Switch centered is normal operation, flipped
towards the serial port is debug mode, and flipped the other way is ???
but thinking in this mode it should send the contents of a "BOOT" file
to the HP as if the IDE interface were a papertape reader, then I won't
have to swap serial cables etc to boot my machine.
The streaming code is coming along - after a bit of debugging I
loaded MAZE
from a file on the USB drive! normal computer users probably won't get
the excitement, but for a minicomputer from the '70's it's fairly major
(and would have been nearly impossible without the VDRIVE2 module with
its built-in dos commands). I still have to write most of the write
stream code but it should be simpler than the read code since there's
no need to keep up with a file pointer for seeks and to determine EOF.
Here's the present "VDOS" word lineup...
; Core functions...
; !VDOS - autostarting word which patches itself to interface slot
; VSYNC - syncronize so responses match last command given
; VECS - syncs, selects extended commands and ascii numbers
; VCLEAR - removes last response if immediately available
; VPROMPT - runs a shell to enter commands and print responses
; VDIR - lists current directory of the USB drive
; "DIRNAME" VCD - changes to a new directory
; "FILE.EXT" VSHOW - lists file contents to the terminal
; "FILE.EXT" VDEL - deletes a file in the current dir
; byte >VDR - sends a byte to the VDRIVE2
; <VDR - pushes a byte from the VDRIVE2 (bit 15 set if not valid)
; "string" $>VDR - sends a string to the VDRIVE2
; "command" $>VCMD - sends a string to the VDRIVE2 plus CR
; PVDR - prints VDRIVE2 response if immediately available
; &WFVDR - wait for response and push 1st byte received
;
; Streaming functions...
; "FILE.EXT" USBAPPEND - redirects MS output to a USB file (appends)
; "FILE.EXT" USBWRITE - redirects MS output to a USB file (overwrites)
; "FILE.EXT" USBREAD - redirects a USB file to MS input
; USBCLOSE - closes a USB streaming output file
; USBSTAT - pushes USB streaming error status (0=ok)
;
; Example stream uses...
; Load an IPL file: "FILE.IPL" USBREAD LOAD
; Import an ABS file to disk file: "PROGNAME.ABS" USBREAD "PROGNAME" ABS2F
; Save current system: "SYSNAME.ABS" USBWRITE SYSALL USBCLOSE
; Append text to file: "FILE.TXT" USBAPPEND "Text" MS$OUT MSCRLF USBCLOSE
It looks like a bunch of stuff but presently only uses about 520
16-bit words of memory, or a bit over 1KB of code. In previous notes
USBREAD was named MS<USB and USBAPPEND was named MS>USB but those
word names are too easy to get backwards with data-losing results so
named them so there'd be no mistake. USBWRITE simply calls VDEL then
calls USBAPPEND to overwrite an existing file. Also, &WFVDR is the
same as WF1B mentioned previously to wait for the VDRIVE to send back a
byte, only machine-coded.
10/10/08 - The sync lockup was because of the code - what was
triggering it was if a sync was called with no disk it completed, but
if called again after a disk was inserted then it wouldn't complete
until the power was cycled. The solution was to call the clear code in
the sync loop when an incorrect response received, updated source and
the algorithm description. Upon testing on my HP2113E I found it still
wasn't working correctly, however the source of the problem had nothing
to do with code and probably has been "messing with me" all along -
when the HP is powered and the HP-IDE interface is off, leakage through
the level shifters raises the supply voltage to about 1.4V. I already
had a 330 ohm resistor from +5V to ground to drain it to this point,
which is low enough to permit the dev board to reset, but not low
enough for the VDRIVE2. So added another 270 ohm resistor from +5V to
ground to drop the leakage to about 0.6V, problem solved.
10/9/08 - [edit] need another IDE
interface command which returns a error value for USB operations...
137xxx - return USB file error value (0=no error)
Error values TBD but will probably mirror the errors returned by the
VDAP USB firmware plus other conditions such as streaming when a buffer
hasn't been defined. The important thing is to make sure nothing goes
wrong no matter what garbage is specified - if a write file is invalid
streaming to it anyway should simply discard the data and set the
appropriate error bit, invalid reads should return 0, etc, with results
no worse than what already happens if a MS word is used on an invalid
stream and in some respects better - getting a stack overflow and a
prompt from an invalid LOAD is messy but much better than what
HP-IPL/OS normally does in such a situation (lock up, requiring halt
and run from 2).
10/8/08 - Improvements to the debug-mode functions... the dos prompt
now automatically adds LF after CR if not present to work properly with
regular VT100-type terminal emulations, the save option now offers a
choice to save up to nine 64-file SFS volumes for use with a pure-IDE
setup, and the image save function now deletes an existing image file
first to avoid lost clusters. I think the general solution to that
problem is don't open a file for write unless intending to actually
write data past the current end of the file, shouldn't be a problem for
the streaming functions but this phenomena would complicate the design
of a disk emulator (none immediately planned but has been discussed)
where file growth does not occur and obviously the existing disk image
file can't be deleted. Or simply ignore the lost cluster that'll always
be present when using such a system (perhaps a firmware update will fix
this). The controller source has been rearranged in preparation for
adding the streaming code, added IDE command word hooks but presently
they're no-ops pointing to comments (subject to change). Got an
autostarting-version loaded so tonight I can test it to make sure it's
still actually a disk controller, need to fix VPROMPT to make sure
ascii command mode is enabled and fix the automatic addition of
linefeeds. Trying to get all the basics solid before starting on the
streaming file code to avoid distraction from having to fix goofy stuff.
10/7/08 - Played with the new controller for a couple of hours...
everything seems to be working fine now (the noise problem seems to be
fixed) except for the intended lockups when I mess up and send the
VDRIVE2 into a blinking-led fit, not getting the commands right has
that effect. After several tries and many lockups and trips to the PC
to fix the resulting file system errors I finally managed to write a
program
that writes a line of text to a file. Had to add a word to wait for a
byte no matter how long it takes but it probably won't be part of the
"official" VDOS package as I don't want to encourage programming in the
Vinculum
command set from HP-IPL/OS, way too tramatic! Here's what it took to
append
"HELLO FILE[crlf]" to a file named "TEST.FILE":
;OPEN TEST.FIL, WRITE "HELLO FILE" TO IT THEN CLOSE FILE
;NEEDS WF1B TO WAIT FOR ONE BYTE...
DEFINE WF1B
DO <VDR DUP IF<0 DROP #0
ELSE #1 ENDIF UNTIL END
OCTAL DEFINE USBTEST
VSYNC "ECS" $>VCMD "IPH" $>VCMD ;EXTENDED COMMANDS, BINARY #
VCLEAR ;CLEAR RESPONSE
"OPW TEST.FIL" $>VCMD ;SEND COMMAND TO OPEN FILE
WF1B DROP WF1B DROP WF1B DROP WF1B VCLEAR ;GET 4TH RESPONSE BYTE
76 SUB IFNZ "OPEN ERROR" $PRINT ELSE ;IF > THEN NO ERROR...
"HELLO FILE" $LEN INC INC ;PUSH STRING, LEN+2
"WRF " $>VDR #0 >VDR #0 >VDR #0 >VDR >VDR 15 >VDR ;SEND WRITE COMMAND
$>VCMD 12 >VDR ;SEND STRING WITH CR PLUS A LF
WF1B DROP VCLEAR ;WAIT TO PROCESS, IGNORE RESPONSE
"CLF TEST.FIL" $>VCMD ;SEND CLOSE COMMAND
WF1B DROP WF1B DROP WF1B DROP WF1B VCLEAR ;CHECK FOR >
76 SUB IFNZ "CLOSE ERROR" $PRINT ENDIF
ENDIF
"IPA" $>VCMD VCLEAR ;RESTORE NUMERICAL NUMBERS
END
...needless to say this simply won't do :-) (but nice to be able to)
The main reason for this test was to see how fast it takes to open a
file, write data to
it then close the file - the first time it takes a few seconds but
after that there's no significant delay, which is very good since to
implement streaming it'll have to repeatedly open and close the output
file to write the buffer when it fills up. All this stuff needs to be
in the controller code so the user won't (or shouldn't) have to worry
about making a mess of the file system like I did while testing. With
streams the above code
reduces to simply "TEST.FIL" MS>USB "HELLO FILE" MS$OUT MSCRLF
USBCLOSE and even if I forgot the close the buffer simply wouldn't get
written rather than corrupting file system. Repeated appends to an
already open file would be simply "string" MS$OUT MSCRLF (if a text
line, adding binary values would be just [number] MSBOUT). Lots of
little details need
to be worked out - like if a new output file is buffered while another
one is active it should do an implied flush of the existing buffer to
the original file first, and if a file isn't buffered, reads should
return 0 and writes should be no-ops.
I noticed a minor problem - when using the debug-mode
save
option to overwrite an existing image file the filesize is correct but
fsck.msdos complains that the cluster chain is slightly longer so
truncates it to match the filesize. No data is lost and if the file
grows the extra cluster is used and no file system errors are reported.
This appears to be
how the current VDAP firmware works, opening a file for write always
allocates an additional cluster, simply entering OPW TEST2.FIL followed
by CLF
TEST2.FIL without writing anything to the file results in the following
when the file system is checked...
dosfsck 2.11, 12 Mar 2005, FAT32, LFN
/TEST2.FIL
File size is 0 bytes, cluster chain length is > 0 bytes.
Truncating file to 0 bytes.
Free cluster summary wrong (55417 vs. really 55418)
Confirmed to happen even with a freshly formatted thumbdrive. This
doesn't seem to be a data
integrity issue, just a wasted cluster I'd never know about except for
looking. Another thing to watch out for - the VDAP firmware knows
nothing about long file names, if a VDAP REN command is used to rename
say an image file, the PC may continue to use the old name and the
DRIVE0.DSK file copied over might not be the one just created. A way
around this is to only have one version and keep other versions on the
PC rather than on the thumbdrive. The rule seem to be don't use the
VDAP REN command to rename files copied from or renamed by a PC, only
use it to rename files created by the VDRIVE2 itself. Also helps to
have only one DRIVE0.DSK file varient on the thumbdrive, otherwise the
DRIVE0.DSK file copied from the thumbdrive to the PC might not be the
one just saved. This effect was discovered when I copied what I thought
was a newly created image to my PC but when I booted it under sim found
it to be a previous version I had renamed. Not a big deal just
something to be aware of.
Anyway... the present to-do list seems to be...
10/6/08 - It's more than a theory now... I implemented the first
part of the specs below (no streams just essential I/O) and it works,
from my minicomputer I can log onto the thumbdrive and list
directories, change directories, list files, etc. It's almost solid as
a rock - but if the VDRIVE2 stops accepting data for any reason the
drive interface locks up, like it did once after doing a lot of disk
I/O. Should probably put a time-out on this, and noticed the SPI output
lines were being switched to input by the disk code, which could cause
the SPI lines to pick up noise from the high-current level shifters,
changed but haven't retested yet. Also changed but haven't tested the
new status request command, now code 105xxx. Latest controller code and
VDOS words posted, which in addition to the VSYNC to VPROMPT words also
has a PVDR word that prints the current response from the VDRIVE2.
One goofy little glitch I didn't think of - the VDRIVE2 sends CR
line ends so I added a LF when one comes along, only that causes files
listed using the RD command to be double-spaced so added a variable to
control whether or not that happens. When RD is used it turns off the
added LF. The present implementation isn't perfect and results in some
garbage around the RD command from missing linefeeds, a better way
would be to add the LF only if one does not appear after CR.
I'm anxious to add the streaming file I/O commands! Having that
would have saved me the 15 minutes it took to extract the entire volume
and boot in under sim to extract the VDOS code I wrote while using the
mini, when I could have just typed "VDOS.IPL" MS>USB MASAVE USBCLOSE
and had the file in seconds.
10/5/08 - Working on adding these new IDE commands...
120xxx - read one byte from the SPI interface, if not valid set bit 15 (and clear lsb?)
121bbb - write one byte to the SPI interface, wait for byte to be accepted
122xxx - call VDRIVE2 sync code
123xxx - call response clear code
...and HP-IPL/OS words like these that use the new commands...
VSYNC - sync with the VDRIVE2 (*)
VCLEAR - clear response from the VDRIVE2 (*)
n >VDR - send one byte to the VDRIVE2 (*)
<VDR - push one byte from the VDRIVE2 (*)
"string" $>VDR - send string to the VDRIVE2 without CR
"string" $>VCMD - send string to the VDRIVE2 with CR
VPROMPT - a VDRIVE2 prompt
The words marked (*) are specific to the IDE interface, so the rest
of the code can be written more generically and reused if the interface
is implemented differently. This is enough to get a dos prompt and even
do simple file processing, but a more structured
approach is needed to safely handle MS streams...
130xxx - open buffered input file - must follow by sending filename[cr]
131xxx - read one byte from buffered input file (if EOF or not open returns 0)
134xxx - open buffered output file - must follow by sending filename[cr]
135bbb - write byte bbb to buffered output file (if not open then a no-op)
136xxx - close buffered output file (if not open then a no-op)
...along with MS-related words (these would be interface-specific)...
"filename" MS>USB - redirect MS output to buffered USB file
USBCLOSE - close USB output file (stops buffering, MS out left redirected)
"filename" MS<USB - redirect MS input to come from buffered USB file
That's more like it, as far as HP-IPL/OS is concerned it'd be like
papertape - to load an IPL file I'd do "filename" MS<USB LOAD, to
punch the system to ABS I'd do "filename" MS>USB SYSALL USBCLOSE, to
load and run an ABS file I'd do "filename" MS<USB RUNABS and all the
other normal MS stream stuff, including things like "filename"
MS<USB "SFSFILE" ABS2F to import an ABS file to a SFS binary. This
sounds reasonable, although some of the words are specific to the IDE
interface the general functions are not and VDRIVE2-aware app code
could be reused regardless of the hardware/firmware implementation.
Previous similar (but less defined) speculation removed except for
the thought that maybe I should add a switch to PF bit 2 so when the
switch is activated the interface sends the contents of a boot file in
a form the HP mini's papertape bootrom can load, then I wouldn't have
to swap cables and send the HP a kickstart program from my PC to make
it go.
10/4/08 - first reasonably stable version of the new controller code
with core image save and restore fuctions accessible from the
controller's debug menu. The save option gives the choice of saving the
boot system and a single 64-file SFS volume (4.1MB) or an amount of
data equivalent to a 7906 disk platter (9.6MB). These choices are
convenient for me as I typically only use one volume, and I format my
IDE disk to 7906 specs so I can swap disk images between the IDE disk
and the SimH HP2100 simulator. The restore option restores however many
complete 1KW blocks are in the image file, so it doesn't take as long
to load smaller images. A SPI/USB debug menu permits sending and
receiving individual bytes to and from the VDRIVE2, and a console "dos
prompt" for directly typing commands and receiving output. Also has an
option which calls user-specified subroutine addresses - while useful
for debugging, need to make it go away unless manually enabled in the
source. Wrote the initial content of this page.
10/3/08 - finally got it to save an image file properly after
upgrading the VDAP firmware. The original 2.08 firmware appeared to
replace some of the output to the output image file with garbage and
occasionally would lay down with the led blinking away. Some of the
effects were probably from my bugs but after upgrading I was able to
save a bootable image using the same code that previously didn't work.
9/28/08 - got a VDRIVE2 USB disk interface module and began coding
the new controller code.
Last mod Nov 1 2008